Robotics has evolved significantly over the past few decades, with actuators and servos playing a crucial role in the development of advanced robotic systems. One of the most prominent components in robotics today is the Dynamixel series of actuators, designed and manufactured by Robotis. Among them, the Dynamixel MX-106R is known for its high-performance capabilities, precision, and advanced features, making it a favorite for researchers, engineers, and robotics enthusiasts dynamixel mx 106r schematic.
This article aims to provide an in-depth guide to the Dynamixel MX-106R, focusing on its schematic, design principles, key features, and applications. We will also explore how the MX-106R integrates into robotics systems, the types of projects it is most commonly used in, and tips for configuring and utilizing this powerful actuator effectively. Additionally, we will address common FAQs about the MX-106R to offer clarity on its operations and troubleshooting dynamixel mx 106r schematic.
Overview of Dynamixel MX-106R
The Dynamixel MX-106R is a servo actuator that combines both a motor and control system into a compact, integrated package. It’s widely used in advanced robotics for various purposes, including robotic arms, humanoid robots, and industrial applications. One of the most notable features of the MX-106R is its high torque-to-weight ratio and its ability to provide precise control over position, velocity, and torque.
Key Specifications of the MX-106R:
- Weight: 153g
- Operating Voltage: 10V – 14.8V (recommended 12V)
- No-load Speed: 45 RPM
- Maximum Torque: 8.4 Nm at 12V
- Communication Protocol: TTL/RS-485
- Control Mode: Position, Velocity, Torque, and Extended Position Control Mode
- Resolution: 0.088° per step
- Feedback: Position, Temperature, Voltage, Current, and Load
Schematic Overview: Internal Components of the Dynamixel MX-106R
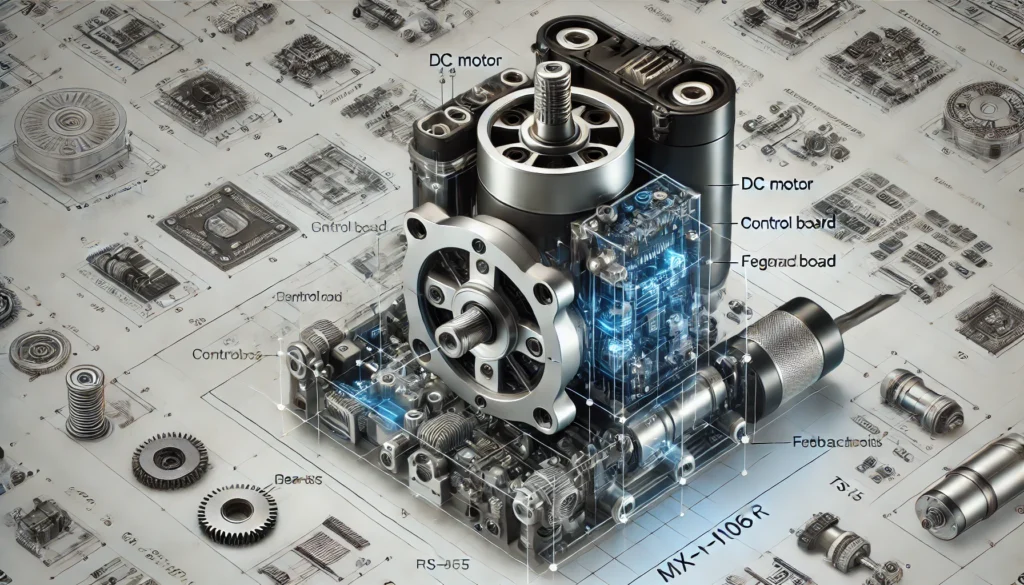
Understanding the schematic of the Dynamixel MX-106R is essential for anyone looking to integrate the servo into a robotic system. The schematic illustrates the various internal components of the actuator, their relationships, and how they interact to deliver the actuator’s range of features. While the detailed circuit diagram may vary depending on the source, here’s an overview of the key internal components:
1. DC Motor
At the heart of the MX-106R is a DC motor that converts electrical energy into mechanical motion. This motor is responsible for generating the torque needed to move the robotic parts connected to the actuator. It is designed to handle high loads while delivering consistent performance.
2. Control Board
The control board is the brain of the actuator. It manages the motor’s operation, ensuring that it follows the instructions received via communication protocols. The board is equipped with microcontrollers and a PID control algorithm, which allows for fine control over the motor’s speed, position, and torque.
3. Motor Driver Circuit
The motor driver circuit is responsible for controlling the power supplied to the motor. It adjusts the voltage and current based on the desired movement parameters (e.g., speed and torque), ensuring the motor operates efficiently and within its limits.
4. Feedback Sensors
The MX-106R is equipped with various feedback sensors that provide real-time data about the actuator’s performance. These include:
- Position Sensor: Measures the precise angular position of the motor.
- Temperature Sensor: Monitors the internal temperature to prevent overheating.
- Current Sensor: Tracks the amount of current drawn by the motor to ensure optimal power delivery.
- Voltage Sensor: Provides information about the input voltage, ensuring stable power supply to the actuator.
5. Communication Interface (TTL/RS-485)
The actuator uses either TTL or RS-485 communication protocols to interface with controllers or computers. The RS-485 protocol is particularly useful for daisy-chaining multiple actuators, allowing for efficient communication in multi-actuator setups. This makes the MX-106R ideal for projects involving multiple servo motors in complex robotic systems.
6. Gearbox
To achieve high torque output, the MX-106R utilizes a robust gearbox that steps down the motor speed while increasing torque. The gears are made from high-strength materials to ensure durability and longevity, even under heavy loads.
7. Heat Management
The actuator also includes heat management components such as thermal cutoff systems and heatsinks to protect the internal electronics and motor from damage due to overheating. This allows the actuator to run for extended periods without performance degradation.
Features of the Dynamixel MX-106R
The Dynamixel MX-106R comes packed with several advanced features that make it a popular choice in high-performance robotics projects. Below are the key features that make the MX-106R stand out:
1. Four Control Modes
The MX-106R offers four distinct control modes, allowing for a wide range of applications:
- Position Control Mode: Ideal for precise angular movement. The servo moves to a specific angle and holds that position.
- Velocity Control Mode: Used when constant speed is required, regardless of the load.
- Torque Control Mode: This mode allows the user to control the torque exerted by the servo, making it perfect for applications where force control is needed.
- Extended Position Control Mode: Extends the range of rotation beyond the standard 360°, allowing for continuous rotation in one direction.
2. High-Resolution Encoder
The MX-106R features a 12-bit resolution encoder that offers fine control over positioning. This high resolution enables precise movements, making it suitable for applications that require exact positioning, such as robotic arms or precision instrumentation.
3. Daisy-Chaining Capability
Thanks to the RS-485 communication protocol, multiple MX-106R actuators can be daisy-chained together. This is especially beneficial for robotic systems where multiple actuators need to work in tandem. By reducing the number of wires needed for communication, daisy-chaining simplifies the overall wiring and control system.
4. Durability and Reliability
The actuator is designed for rugged use, with metal gears and a high-strength housing that ensures it can handle heavy loads and extended use without mechanical failure. This makes the MX-106R ideal for industrial robots, automated machinery, and other applications where durability is a key consideration.
5. Real-Time Feedback
The feedback sensors within the MX-106R provide real-time data on position, temperature, voltage, and current. This allows for continuous monitoring of the actuator’s performance, enabling users to make adjustments on the fly and ensuring the actuator remains within safe operating limits.
6. 360° Continuous Rotation
Unlike traditional servos that are limited to 180° or 270° of movement, the MX-106R can achieve 360° continuous rotation in certain modes, making it useful for applications such as robot joints, wheels, and turrets.
Applications of the Dynamixel MX-106R
Due to its advanced features and flexibility, the Dynamixel MX-106R is used in a wide variety of applications across multiple industries. Below are some of the most common use cases for this powerful actuator:
1. Humanoid Robots
The MX-106R’s precise position and torque control make it an ideal actuator for humanoid robots, where precise limb movements are required. It is commonly used in the joints of robotic arms, legs, and even in the neck for head movement.
2. Robotic Arms
Precision is crucial in robotic arms used for tasks such as assembly, welding, or material handling. The MX-106R provides the fine control needed for these applications, allowing robotic arms to move and grip objects with high accuracy.
3. Exoskeletons
Exoskeletons designed to assist with human movement often require actuators that can respond to subtle changes in force and position. The torque control and feedback mechanisms of the MX-106R make it a great fit for wearable robotics, particularly in medical and rehabilitation devices.
4. Autonomous Vehicles
In autonomous robots and vehicles, actuators like the MX-106R control the movement of wheels, sensors, or other moving parts. The high torque output and continuous rotation capabilities are particularly useful for locomotion and steering mechanisms.
5. Research and Education
The MX-106R is widely used in research and educational projects, especially in universities and research institutions that focus on robotics and automation. Its ability to provide real-time feedback and its ease of integration make it a valuable tool for prototyping and experimentation.
How to Integrate the MX-106R into Robotic Systems
Integrating the MX-106R into a robotic system requires a basic understanding of how to control the actuator, as well as how to connect it to the central control system (e.g., microcontroller or computer). Below is a step-by-step guide to getting started:
1. Powering the Actuator
The MX-106R operates at a voltage range of 10V to 14.8V, with 12V being the recommended operating voltage. Make sure to use a power supply that can provide sufficient current, especially if you’re using multiple actuators.
2
. Communication Protocol The actuator supports both TTL and RS-485 communication protocols. RS-485 is ideal for daisy-chaining multiple actuators, while TTL is suitable for simpler setups. Ensure that the controller or microcontroller you are using can support the chosen communication protocol.
3. Setting the Control Mode
Before using the actuator, set the desired control mode (Position, Velocity, Torque, or Extended Position) via the control software or communication commands. Each mode is suited to different types of applications, so choose the one that best fits your needs.
4. Writing Control Algorithms
The MX-106R is typically controlled via a PID control algorithm, which ensures precise motion. Libraries and SDKs provided by Robotis make it easy to write control algorithms for the actuator, with support for programming languages such as C++, Python, and ROS (Robot Operating System).
5. Monitoring Feedback
Utilize the real-time feedback from the actuator’s sensors to monitor its performance. This data can be used to adjust control parameters on the fly, improving accuracy and efficiency in dynamic environments.
Common Challenges and Troubleshooting
While the Dynamixel MX-106R is designed to be reliable, there may be times when issues arise during its operation. Here are some common challenges and troubleshooting tips:
1. Overheating
If the actuator becomes too hot during operation, it may shut down to protect itself. Ensure that the actuator is not overloaded, and provide sufficient cooling if it will be used continuously for extended periods.
2. Communication Errors
Ensure that the wiring for the communication lines is correct and that the baud rate settings on the controller match the settings in the actuator. RS-485 connections must be properly terminated to prevent signal reflections.
3. Inconsistent Movements
If the actuator’s movements are erratic, check for mechanical issues such as gear misalignment or binding. Also, verify that the control signals are correct and that there is no noise in the power supply.
Conclusion
The Dynamixel MX-106R is a powerful, versatile actuator that plays a critical role in advanced robotics applications. Its combination of high torque, precise control, and robust feedback systems makes it ideal for a wide range of tasks, from humanoid robots to industrial automation. By understanding its schematic, features, and best practices for integration, users can unlock the full potential of the MX-106R in their projects.
FAQs About Dynamixel MX-106R
1. What is the torque output of the MX-106R?
The Dynamixel MX-106R provides a maximum torque of 8.4 Nm at 12V.
2. What communication protocols does the MX-106R support?
The actuator supports both TTL and RS-485 communication protocols for flexible integration into various robotic systems.
3. Can the MX-106R be used for continuous rotation?
Yes, the MX-106R supports 360° continuous rotation in extended position mode, making it ideal for applications that require full circular motion.
4. What is the recommended operating voltage for the MX-106R?
The recommended operating voltage is 12V, with an acceptable range of 10V to 14.8V.
5. How can I monitor the performance of the MX-106R?
The actuator provides real-time feedback on position, temperature, voltage, and current, allowing for continuous performance monitoring.
6. Is the MX-106R suitable for use in humanoid robots?
Yes, the high torque output, precise control, and compact design make the MX-106R ideal for use in humanoid robots, particularly in joints and limbs.